微分方程组
弹簧-重物系统(Mass-Spring System)
假设有一个弹簧垂直挂在一个水平面下,现在给弹簧下方挂上一个重物。由牛顿第二定律有:
弹簧的拉力 = 挂着重物的质量 重物的加速度 $$F = ma = m \frac{d^2y}{dt^2}$$
又由胡可定律:
弹簧的拉力 = 系数 弹簧的位置变化 $$F = -ky$$
令两者相等有:
$$m\frac{d^2y}{dt^2} = -ky\ m\frac{d^2y}{dt^2} + ky = 0$$
这是一个二阶(二阶导数)自治(只有y没有t)微分方程
一般而言二阶自治微分方程包括:
- 一个自变量
- 一个因变量
- 方程形式为:$$\frac{d^2y}{dt^2} = f(x, \frac{dy}{dt})$$
再有两个二阶自治方程的例子: 范德波尔方程(van der pol ):
$$\frac{d^2x}{dt^2} - (1-x^2)\frac{dx}{dt} + x = 0$$ 达芬方程(duffing):
$$\frac{d^2x}{dt^2} + b\frac{dx}{dt} + kx + x^3= 0$$
狐狸-兔子模型
开始进入一阶方程组的讨论。我们用最简单的捕猎(predator-prey)系统。假设捕食者是狐狸,猎物是兔子。
前提假设如下:
- 如果没有狐狸,兔子的繁殖率与其当前数量成正比,并且没有上限
- 如果没有兔子,狐狸的死亡率与其当前数量成正比
- (兔子被狐狸吃掉的频率)与(狐狸与兔子相遇的频率)成正比
- (狐狸繁殖率)与(兔子被捕杀的数量)成正比,即与(狐狸与兔子相遇的频率)成正比
变量:
- 自变量:时间 $$t$$
- 因变量:兔子的数量 $$R$$, 狐狸的数量 $$F$$
根据前提假设1,3:
$$\frac{dR}{dt} = aR - bRF$$
根据前提假设2,4:
$$\frac{dF}{dt} = - cF + dRF$$
两个方程一起,我们获得了方程组:
$$\frac{dR}{dt} = aR - bRF$$
$$\frac{dF}{dt} = - cF + dRF$$
其中参数$$a,b,c,d$$都是正数
上面的例子是一个一般一阶自治微分方程组,一般而言,一个一阶自治方程组包括:
- 一个自变量
- 两个因变量
- 形式为:$$\begin{cases} \frac{dx}{dt} = f(x,y) \ \frac{dy}{dt} = g(x,y) \end{cases}$$
平衡解是两个函数$$R(t),F(t)$$使得方程组中两个方程永远成立。
$$\begin{cases} aR - bRF = R(a-bF) = 0 \ - cF + dRF = F(dR - c) = 0 \end{cases}$$
得出两个平衡解:
$$\begin{cases} R(t) = 0 \ F(t) = 0 \end{cases}$$ 以及:
$$\begin{cases} R(t) = \frac{c}{d} \ F(t) = \frac{a}{b} \end{cases}$$
回到我们的捕猎方程组,考虑一个具体问题,令参数如下:
$$a = 2, b = 1.2, c = 1, d = 0.9$$
$$\frac{dR}{dt} = 2R - 1.2RF$$
$$\frac{dF}{dt} = - F + 0.9RF$$ 不难发现有两组平衡解:$$(R(t),F(t) = (0,0)$$和$$(R(t),F(t))=(10/9,5/3)$$,若在$$R-F$$平面,称为相位平面(Phase Plane),这两组解对应于两个点。
现在假设初值为:$$(R_0, F_0) = (1.0, 0.5)$$
用数值近似方法看一下$$R(t)$$和$$F(t)$$的表现:
import numpy as np
import sympy
from sympy.abc import t
from sympy import Function, Derivative, dsolve, Eq
import matplotlib.pyplot as plt
def reduceSize(Range, p):
return [Range[i] for i in range(len(Range)) if i%p == 0]
R = Function('R')
F = Function('F')
formulaR = 2*R(t) - 1.2*R(t)*F(t)
formulaF = -1*F(t) + 0.9*R(t)*F(t)
tdomain = np.array([i*0.0005 for i in range(32000)])
dt = 0.0005
Rrange = [1.0]
Frange = [0.5]
for t in tdomain[1:]:
dR = formulaR.subs({'R(t)':Rrange[-1] , 'F(t)': Frange[-1]})
dF = formulaF.subs({'R(t)':Rrange[-1] , 'F(t)': Frange[-1]})
Rrange.append(Rrange[-1]+dt*dR)
Frange.append(Frange[-1]+dt*dF)
Trange = reduceSize(tdomain, 100)
Rrange = reduceSize(Rrange, 100)
Frange = reduceSize(Frange, 100)
plt.plot(Trange,Rrange, 'lightblue',Trange,Frange, 'darkblue')
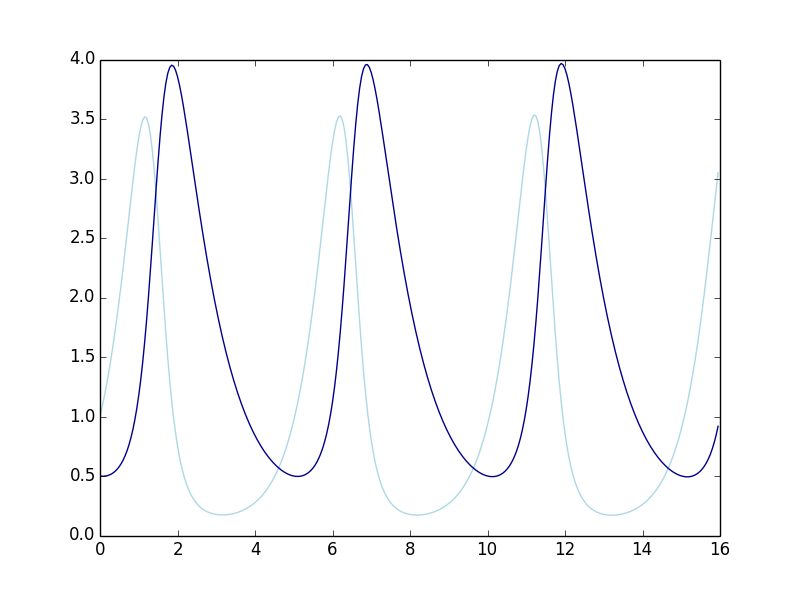 兔子的数量是淡蓝色的曲线,狐狸的数量是深蓝色的曲线,发现两者都是在上下震荡着。上面这个图称为成分图(component graph)
兔子的数量是淡蓝色的曲线,狐狸的数量是深蓝色的曲线,发现两者都是在上下震荡着。上面这个图称为成分图(component graph)
看一看相位平面
plt.plot(Rrange, Frange)
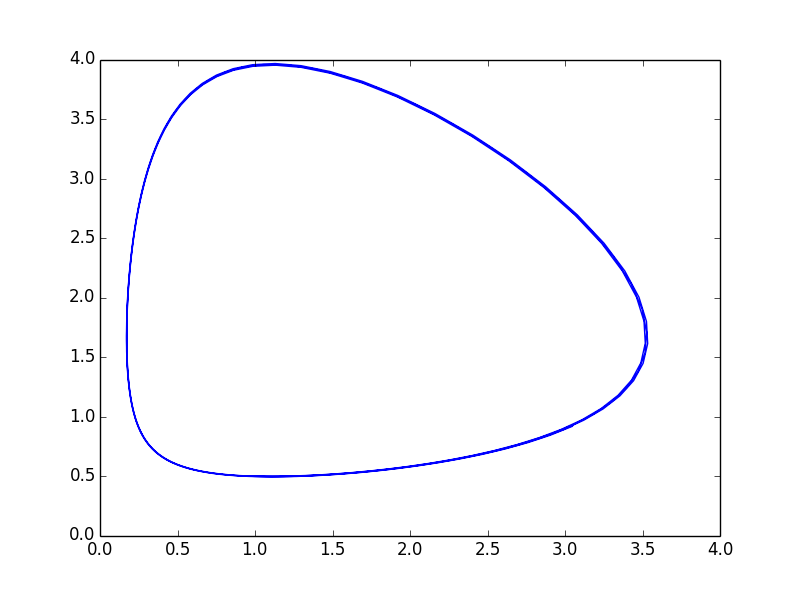 横轴是兔子的数量,纵轴是狐狸的数量。在相位平面的这个曲线,被称为解曲线(solution curve)
横轴是兔子的数量,纵轴是狐狸的数量。在相位平面的这个曲线,被称为解曲线(solution curve)
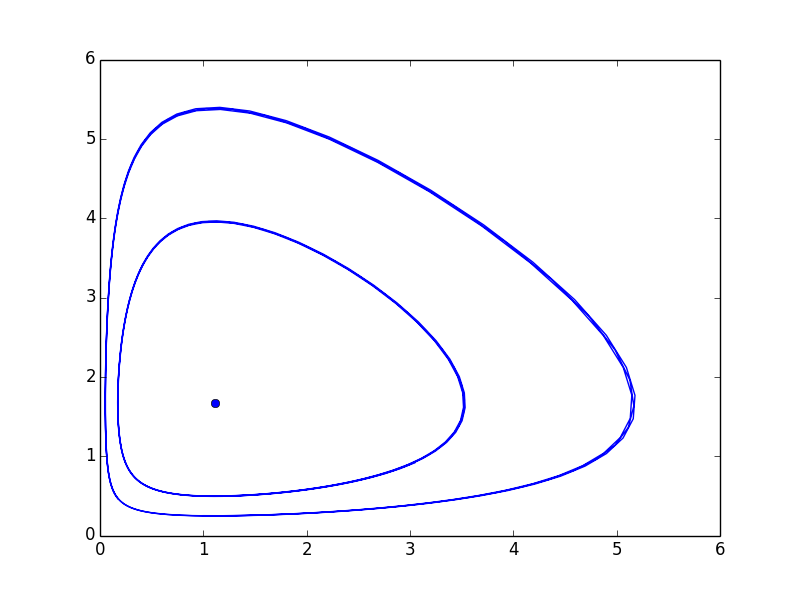
不同的初值,对应于相位平面内不同的解曲线,在同一个相位平面内,将方程组的多个解曲线绘制而出就成了相位图(phase portrait)
Rrange2 = [1.0]
Frange2 = [0.25]
for t in tdomain[1:]:
dR = formulaR.subs({'R(t)':Rrange2[-1] , 'F(t)': Frange2[-1]})
dF = formulaF.subs({'R(t)':Rrange2[-1] , 'F(t)': Frange2[-1]})
Rrange2.append(Rrange2[-1]+dt*dR)
Frange2.append(Frange2[-1]+dt*dF)
Rrange3 = [10.0/9]
Frange3 = [5.0/3]
plt.plot(Rrange, Frange, 'blue',
Rrange2, Frange2, 'blue',
Rrange3, Frange3, 'bo')
3D 交互图! 拖动起来反应比较慢,比不上老师matlab里的图。
fig = plt.figure()
ax = fig.gca(projection='3d')
ax.plot(Rrange, Frange, Trange)
ax.plot(Rrange, Frange, [0 for t in Trange])
ax.plot([0 for t in Trange], Frange, Trange)
ax.plot(Rrange, [0 for t in Trange], Trange)
ax.set_xlabel(r'$R(t)$')
ax.set_ylabel(r'$F(t)$')
ax.set_zlabel(r'$t$')
plt.show()

从上往下看$$R-F$$平面
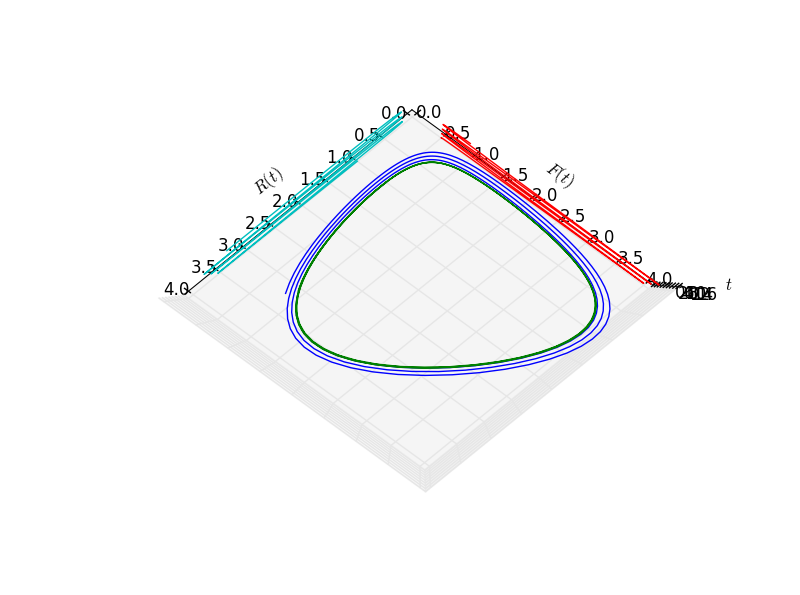
换一个角度看$$R(t),F(t)$$随$$t$$的变化

本节开头引入的弹簧-重物系统$$m\frac{d^2y}{dt^2} + ky = 0$$虽然是一个单一的二阶微分方程,但是如果我们引入$$\frac{dy}{dt} = v$$便可获得一个微分方程组:
$$\frac{dy}{dt} = v$$
$$\frac{dv}{dt} = -\frac{k}{m}y$$ 成为一个一阶方程组,这种方法称为降阶法。
弹簧-重物系统与我们的捕猎系统不同的一点在于:我们可以找到弹簧-重物系统的公式解,而无法找出捕猎系统的公式解。 考虑一个特殊情况,令$$k=m$$,则弹簧-重物系统简化为:
$$\frac{dy}{dt} = v$$
$$\frac{dv}{dt} = -y$$ 下面这些函数都是该系统的解之一
$$y_1(t)=sint, y_2(t)=2sint, y_3(t)=cost$$