向量场
回顾上节的弹簧-重物系统的一个具体例子:
$$\begin{cases} \frac{dy}{dt} = v \ \frac{dv}{dt} = -y \end{cases}$$
看一下上面微分方程组的表现:
import numpy as np
import sympy
from sympy.abc import t
from sympy import Function, Derivative, dsolve, Eq
import matplotlib.pyplot as plt
import matplotlib as mpl
from mpl_toolkits.mplot3d import Axes3D
def numericalApproxForTwo(fR, fF, R0, F0, dt = 0.0005, steps = 300):
def reduceSize(Range, p):
return [Range[i] for i in range(len(Range)) if i%p == 0]
tdomain = np.array([i*dt for i in range(steps)])
Frange = [F0]
Rrange = [R0]
for t in tdomain[1:]:
dR = fR.subs({'R(t)':Rrange[-1] , 'F(t)': Frange[-1]})
dF = fF.subs({'R(t)':Rrange[-1] , 'F(t)': Frange[-1]})
Rrange.append(Rrange[-1]+dt*dR)
Frange.append(Frange[-1]+dt*dF)
Trange = reduceSize(tdomain, 100)
Rrange = reduceSize(Rrange, 100)
Frange = reduceSize(Frange, 100)
return Trange, Rrange, Frange
R = Function('R')
F = Function('F')
formulaR = F(t)
formulaF = -1*R(t)
Tvals,Rvals,Fvals = numericalApproxForTwo(formulaR, formulaF, 1.0, 1.0, dt = 0.0005, steps = 20000)
# component graph!
plt.plot(Tvals,Rvals, 'lightblue',Tvals,Fvals, 'darkblue')
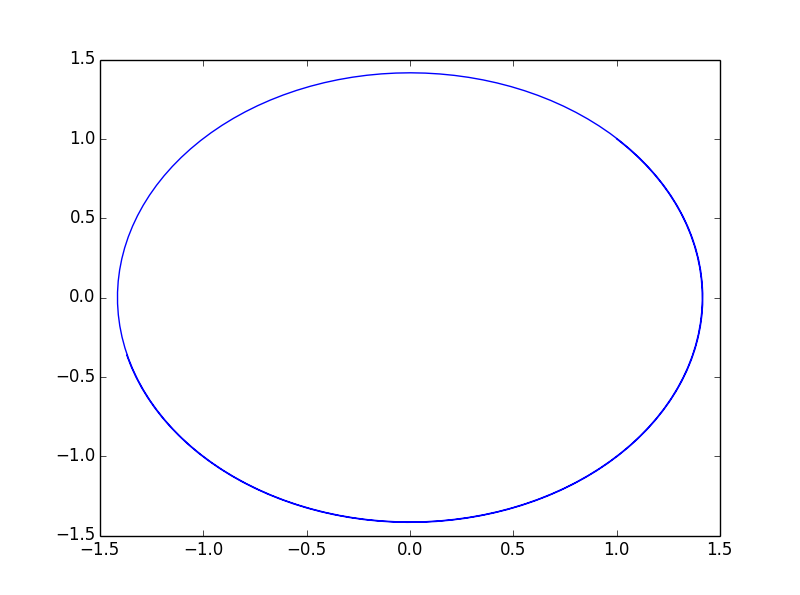
# solution curve in phase plane
plt.plot(Rvals, Fvals)
如果用向量表示法来看该微分方程系统。
令向量$$Y(t)=\begin{pmatrix} y(t)\v(t) \end{pmatrix}$$
想象一个$$y-v$$平面,给定一个$$t$$值,$$Y(t)$$则对应的是平面中的一点。对其求导获得$$\frac{dY}{dt} = \begin{pmatrix} \frac{dy}{dt} \ \frac{dv}{dt} \end{pmatrix}$$,为微分方程组的左边。
令$$F$$是向量$$Y$$的一个函数,且$$F(Y) = F(\begin{pmatrix} y \ v \end{pmatrix}) = \begin{pmatrix} v \ -y \end{pmatrix}$$,为微分方程组的右边。
因而可以将原微分方程组改写为:$$\frac{dY}{dt} = F(Y)$$,即将一个原本为两个标量的微分方程组,变成了一个向量的微分方程。
用导数的“随着输入的微小变化,输出所相应的变化”理解来看,上面方程$$\frac{dY}{dt} = F(Y)$$描述的是,随着$$t$$的微小变化,$$y-v$$平面中位置的相应变化。
据几个具体点,计算其导数:
$$F(\begin{pmatrix} 1\0 \end{pmatrix}) = \begin{pmatrix}0\-1\end{pmatrix}$$
$$F(\begin{pmatrix} 0\1 \end{pmatrix}) = \begin{pmatrix}1\0\end{pmatrix}$$
$$F(\begin{pmatrix} -1\-1 \end{pmatrix}) = \begin{pmatrix}-1\0\end{pmatrix}$$
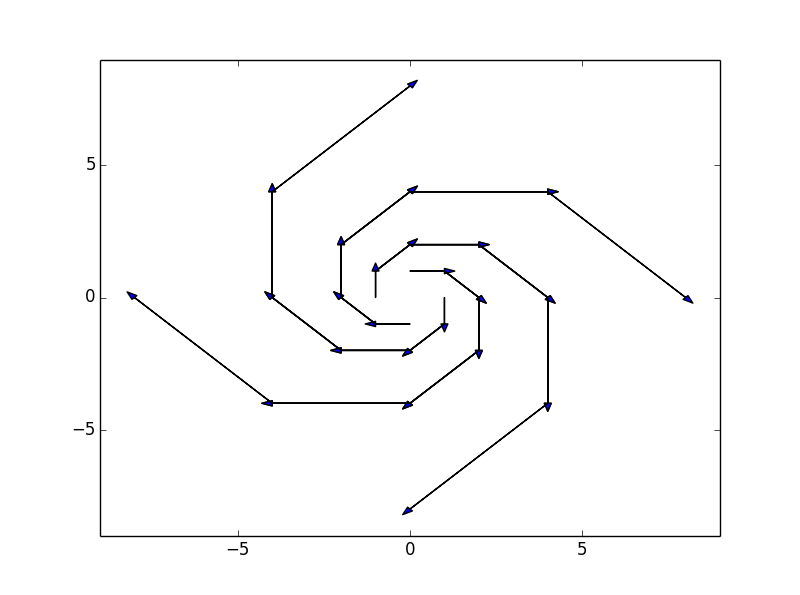
导数的结果也是向量,且长度根据输入值得不同而不同。在$$y-v$$平面上绘制出不同位置出的导数所代表的向量,获得向量场(Vector Field):
def vectorField(fR, fF, Rdomain, Fdomain, points = [], steps = 5):
fig = plt.figure(num=1)
colors = ['red', 'green', 'blue', 'orange', 'black']
for i, point in enumerate(points):
Rvals, Fvals, r,f = [], [], [], []
pr, pf = point[0], point[1]
for step in range(steps):
Rvals.append(pr)
Fvals.append(pf)
r.append(int(fR.subs({'R(t)': Rvals[-1], 'F(t)':Fvals[-1]})))
f.append(int(fF.subs({'R(t)': Rvals[-1], 'F(t)':Fvals[-1]})))
pr, pf = pr+r[-1], pf+f[-1]
plt.arrow(Rvals[-1],Fvals[-1],r[-1],f[-1], head_width = 0.2)
plt.xlim([Rdomain[0],Rdomain[-1]])
plt.ylim([Fdomain[0],Fdomain[-1]])
return fig
R = Function('R')
F = Function('F')
formulaR = F(t)
formulaF = -1*R(t)
Rdomain = np.linspace(-9,9,30)
Fdomain = np.linspace(-9,9,30)
fg2 = vectorField(formulaR, formulaF, Rdomain, Fdomain, points = [(0,1),(1,1),(1,0),(1,-1),(0,-1),(-1,-1),(-1,0),(-1,1)], steps = 5)
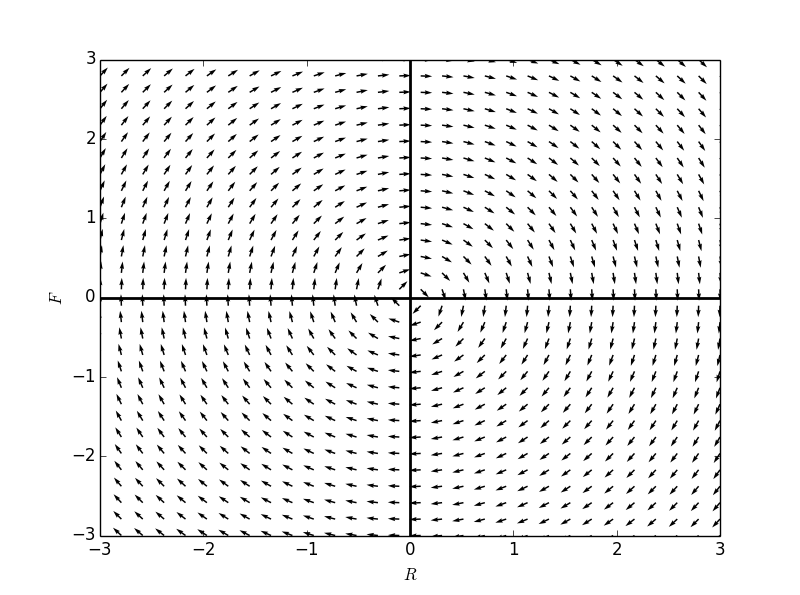
如果只考虑向量的方向(均标准化为同样的长度),绘制出的便是方向场(Direction Field):
def directionField(fR, fF, Rdomain, Fdomain):
fig = plt.figure(num=1)
Rvals,Fvals = np.meshgrid(Rdomain,Fdomain)
r = np.array([[fR.subs({'R(t)':rval, 'F(t)':fval}) for rval in Rdomain] for fval in Fdomain],dtype = 'float')
f = np.array([[fF.subs({'R(t)':rval, 'F(t)':fval}) for rval in Rdomain] for fval in Fdomain],dtype = 'float')
n = np.sqrt(r**2+f**2)
r, f = r/n, f/n
plt.quiver(Rvals, Fvals, r, f)
plt.xlabel(r"$R$")
plt.ylabel(r"$F$")
plt.axhline(0,0,1,linewidth = 2, color = 'black')
plt.axvline(0,0,1,linewidth = 2, color = 'black')
return fig
R = Function('R')
F = Function('F')
formulaR = F(t)
formulaF = -1*R(t)
Rdomain = np.linspace(-3,3,30)
Fdomain = np.linspace(-3,3,30)
fg1 = directionField(formulaR, formulaF,Rdomain, Fdomain)
fg1.show()
自治方程组的向量表示
考虑一个方程组:
$$\begin{cases} \frac{dx}{dt} = f(x,y) \ \frac{dy}{dt} = g(x,y) \end{cases}$$
根据微分方程组的右边定义一个向量场:
$$F(\begin{pmatrix} x \ y \end{pmatrix}) = \begin{pmatrix} f(x,y) \ g(x,y) \end{pmatrix}$$
我们定义一个关于$$t$$的一个输出为向量的函数:
$$Y(t) = \begin{pmatrix} x(t)\y(t) \end{pmatrix}$$
将原本的方程组改写为:
$$\frac{dY}{dt} = F(Y)$$
例子:
$$\begin{cases} \frac{dx}{dt} = -y \ \frac{dy}{dt} = x - 0.3y \end{cases}$$
方程组对应的向量场为:
$$F(Y) = F(\begin{pmatrix} x \ y \end{pmatrix}) = \begin{pmatrix} -y \ x - 0.3y \end{pmatrix}$$
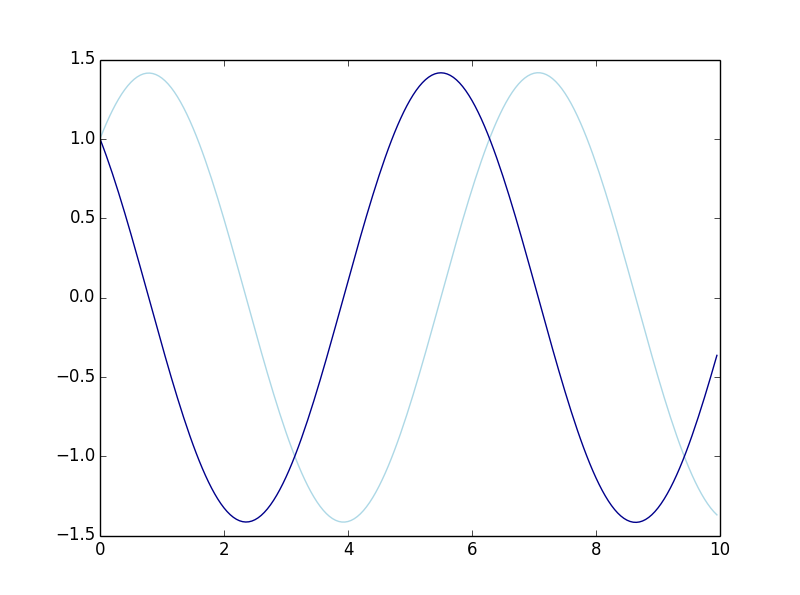
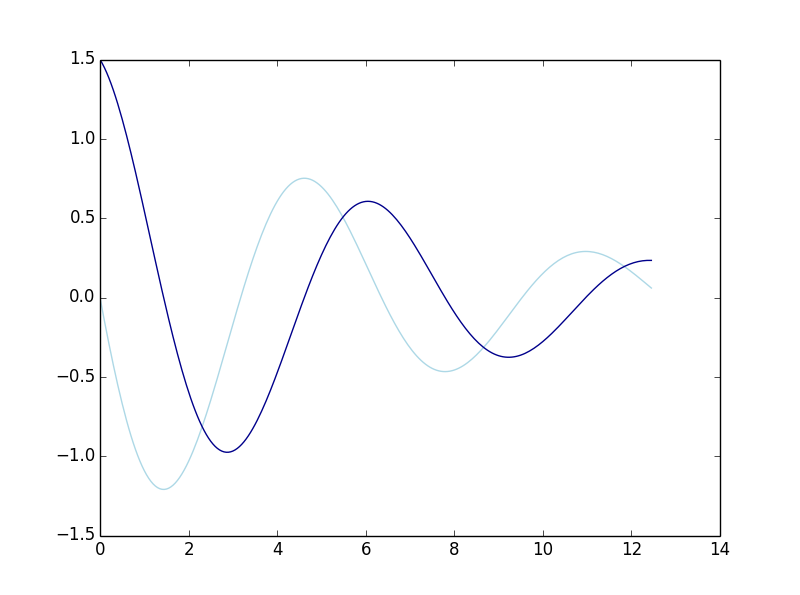
假设初值为$$F(\begin{pmatrix} 0 \ 1.5 \end{pmatrix})$$ 则对应解的成分图为:
R = Function('R')
F = Function('F')
formulaR = -1*F(t)
formulaF = R(t)-0.3*F(t)
Tvals,Rvals,Fvals = numericalApproxForTwo(formulaR, formulaF, 0, 1.5, dt = 0.0005, steps = 25000)
# component graph!
plt.plot(Tvals,Rvals, 'lightblue',Tvals,Fvals, 'darkblue')
 将该解绘制在方向场上:
将该解绘制在方向场上:
Rdomain = np.linspace(-2,2,30)
Fdomain = np.linspace(-2,2,30)
fg3 = directionField(formulaR, formulaF,Rdomain, Fdomain)
plt.plot(Rvals, Fvals)
fg3.show()
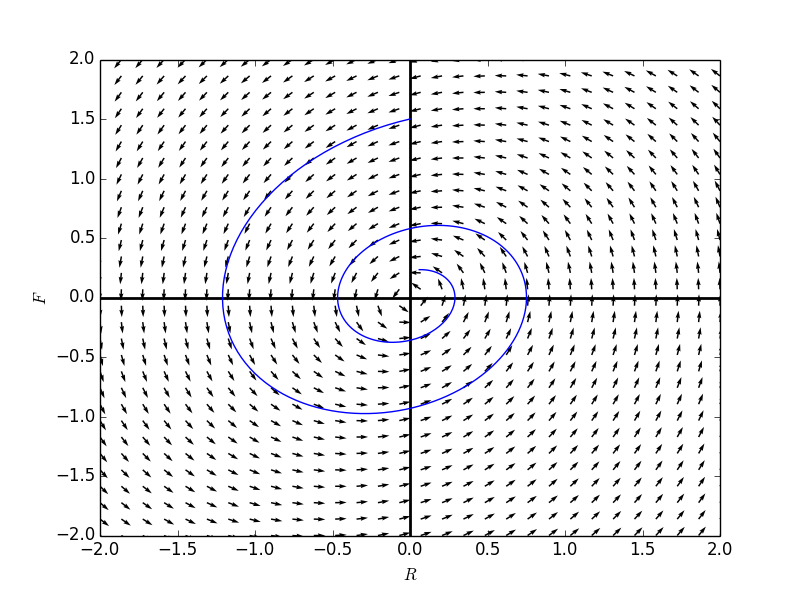
注意到:方向场之间能揭示,随着时间变化,方程组解的走势。而向量场在此基础上还能揭示,解变化的速度(向量的长度)。
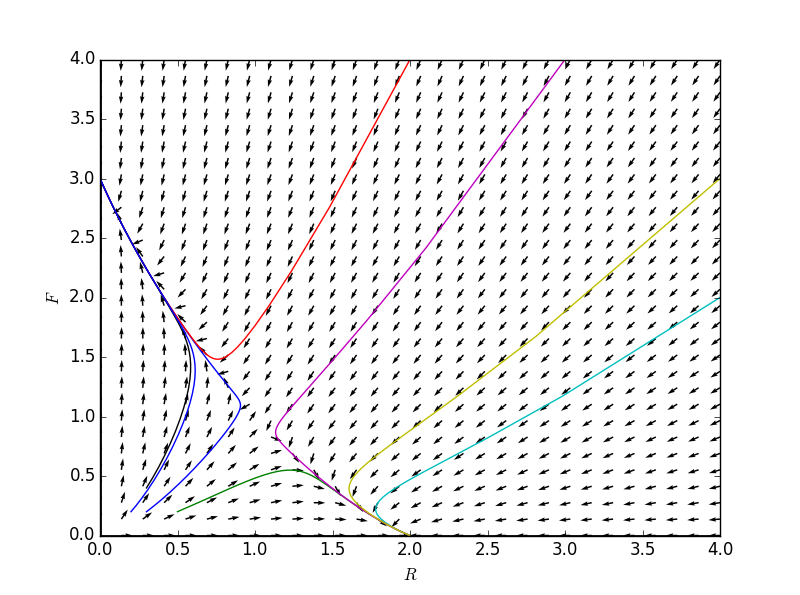
例子
考虑一个两种生物竞争的环境
$$\begin{cases} \frac{dx}{dt} = 2x(1-\frac{x}{2}) -xy \ \frac{dy}{dt} = 3y(1-\frac{y}{3}) - 2xy \end{cases}$$
可以理解为两种生物正常繁殖是依循罗吉斯特人口模型,而两者之间的相互作用会导致数量的下降。竞争中生物$$y$$受到的负面影响是生物$$x$$的两倍。
首先尝试计算平衡解,将方程组改写为:
$$\begin{cases} \frac{dx}{dt} = x(2-x-y) \ \frac{dy}{dt} = 3(3-y-2x) - 2xy \end{cases}$$
不难得出3个平衡解为:$$(0,0),(0,3),(2,0),(1,1)$$
注意到$$(0,3),(2,0)$$这两个解是只存在一种生物的罗吉斯特模型的解。
方向场:
R = Function('R')
F = Function('F')
formulaR = 2*F(t)*(1- F(t)/2) - F(t)*R(t)
formulaF = 3*R(t)*(1- R(t)/3) - 2*R(t)*F(t)
Rdomain = np.linspace(0,4,30)
Fdomain = np.linspace(0,4,30)
fg5 = directionField(formulaR, formulaF,Rdomain, Fdomain)
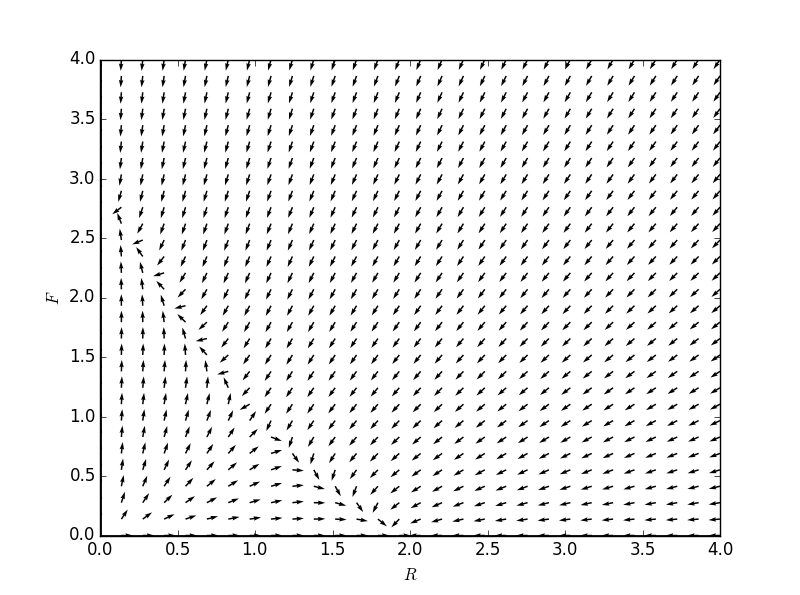
可以看出在根据初值的不同,随着时间变化会出现两种趋势,看几个初值问题的解:
fg5 = directionField(formulaR, formulaF,Rdomain, Fdomain)
points = [(0.3,0.2),(0.5,0.2),(2.0,4.0),(4.0,2.0),(3,4),(4,3),(0.3,0.4),(0.2,0.2)]
for point in points:
Tvals,Rvals,Fvals = numericalApproxForTwo(formulaR, formulaF, point[0], point[1], dt = 0.001, steps = 20000)
plt.plot(Rvals, Fvals)
fg5.show()