阻尼谐振(Damped Harmonic Oscillation)
为我们之前提到的弹簧-重物系统增加上阻力。
前提假设:
- 阻力与重物的速度成正比: $$F_d = -b\frac{dy}{dt}, b > 0$$
- 牛顿第二定律:$$F=ma$$
- 胡克定律: $$F_s = -ky$$
变量:
- 自变量:$$t$$ 时间
- 因变量:$$y$$ 位移
获得阻尼振动的方程为:
$$F_s + F_d = F = ma = m \frac{d^2y}{dt^2}\ -ky -b\frac{dy}{dt} = m \frac{d^2y}{dt^2} \ m\frac{d^2y}{dt^2} + b\frac{dy}{dt} +ky = 0$$
可以令$$v = \frac{dy}{dt}$$,将上面方程降为一个一阶方程组:
$$\begin{cases} \frac{dy}{dt} = v \ \frac{dv}{dt} = -\frac{k}{m}y - \frac{b}{m}v \end{cases}$$
给定一个初始的位置$$y=3$$,令$$k,m$$不变,调节$$b$$值,看解的不同表现:
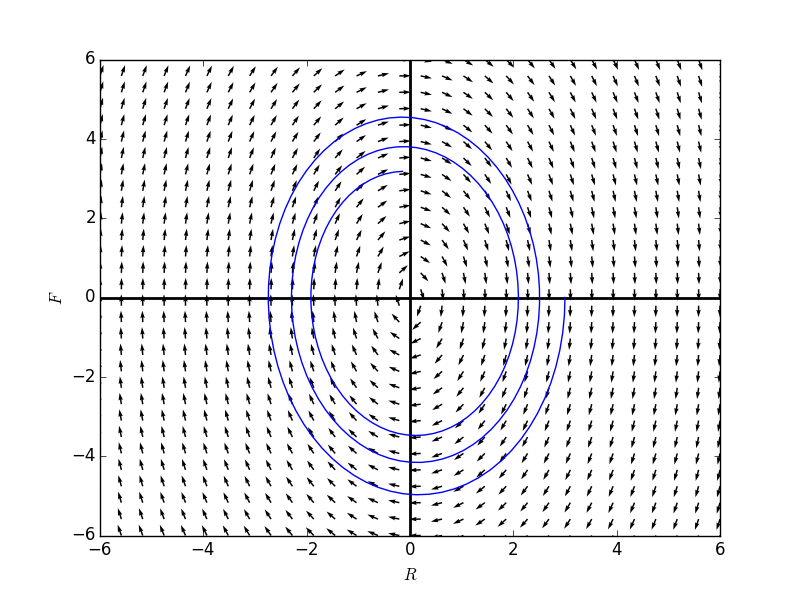
当$$b = 0$$时,没有阻力:
R = Function('R')
F = Function('F')
formulaR = F(t)
formulaF = -3*R(t)
Rdomain = np.linspace(-6,6,30)
Fdomain = np.linspace(-6,6,30)
fg1 = directionField(formulaR, formulaF,Rdomain, Fdomain)
Tvals,Rvals,Fvals = numericalApproxForTwo(formulaR, formulaF, 3.0, 0.0, dt = 0.0005, steps = 20000)
plt.plot(Rvals, Fvals)
fg1.show()

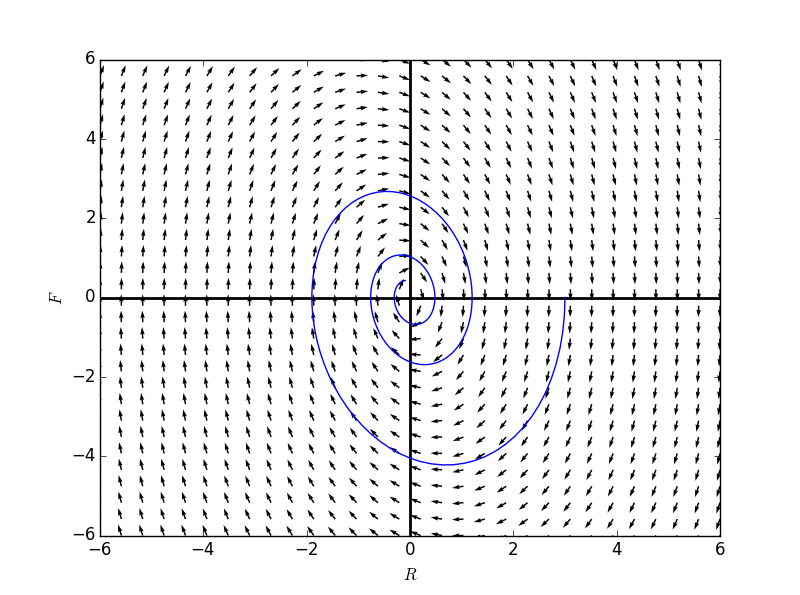
R = Function('R')
F = Function('F')
formulaR = F(t)
formulaF = -3*R(t) - 0.1*F(t)
Rdomain = np.linspace(-6,6,30)
Fdomain = np.linspace(-6,6,30)
fg2 = directionField(formulaR, formulaF,Rdomain, Fdomain)
Tvals,Rvals,Fvals = numericalApproxForTwo(formulaR, formulaF, 3.0, 0.0, dt = 0.0005, steps = 20000)
plt.plot(Rvals, Fvals)
fg2.show()
R = Function('R')
F = Function('F')
formulaR = F(t)
formulaF = -3*R(t) - 0.1*F(t)
Rdomain = np.linspace(-6,6,30)
Fdomain = np.linspace(-6,6,30)
fg2 = directionField(formulaR, formulaF,Rdomain, Fdomain)
Tvals,Rvals,Fvals = numericalApproxForTwo(formulaR, formulaF, 3.0, 0.0, dt = 0.0005, steps = 20000)
plt.plot(Rvals, Fvals)
fg2.show()
猜测阻尼振动的一般解
$$ m\frac{d^2y}{dt^2} + b\frac{dy}{dt} +ky = 0$$
猜测$$y(t) = e^{\lambda t}$$,其中$$\lambda$$是一个需要计算得出的常数。
$$\frac{dy}{dt} = \lambda e^{\lambda t}$$
$$\frac{d^2y}{dt^2} = {\lambda}^2 e^{\lambda t}$$
带入方程获得:
$$m({\lambda}^2 e^{\lambda t}) + b(\lambda e^{\lambda t}) + k e^{\lambda t} = 0 \ (m{\lambda}^2 + b\lambda +k) e^{\lambda t} = 0$$
左边是一个多项式乘以$$e^{\lambda t}$$,该多项式被称为特征多项式(characteristic polynomial)
因为我们关注的是$$\lambda$$取值为多少能使得该多项式取值为$$0$$,因此又称$$m{\lambda}^2 + b\lambda +k = 0$$为特征方程。
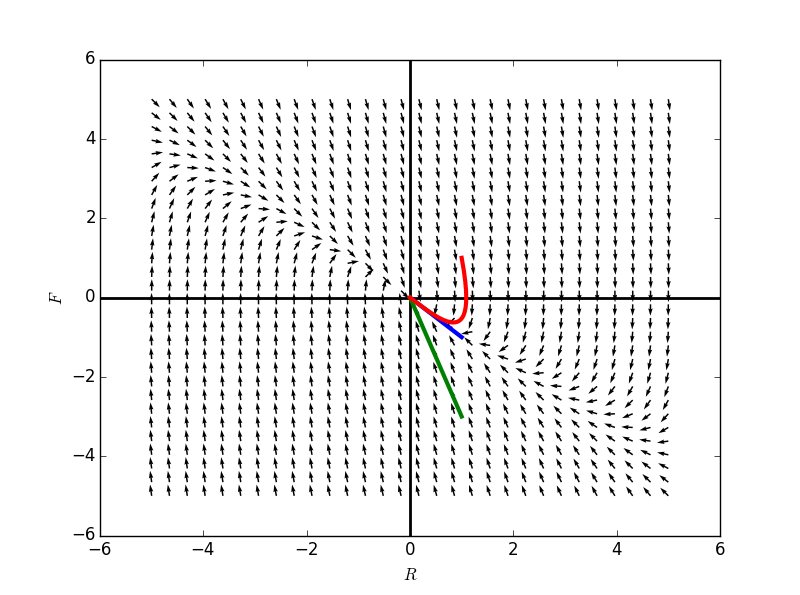
例子:$$m = 1,b = 3,k = 2$$
$$\frac{d^2y}{dt^2} + 3\frac{dy}{dt} + 2y = 0$$ 特征方程为:
$${\lambda}^2 + 3\lambda + 2 = 0$$ 解为:
$$\begin{cases} \lambda = -2 \ \lambda = -1 \end{cases}$$
因此获得原方程的两组解:
$$\begin{cases} y_1(t) = e^{-2t} \ v_1(t) = -2e^{-2t}\end{cases}$$
$$\begin{cases} y_2(t) = e^{-t} \ v_2(t) = -e^{-t}\end{cases}$$
写成向量函数的形式为:
$$Y_1(t) = \begin{pmatrix} e^{-2t} \ -2e^{-2t} \end{pmatrix}$$ 对应初值为:
$$ Y_1(0) = \begin{pmatrix} 1 \ -2 \end{pmatrix}$$
$$Y_2(t) = \begin{pmatrix} e^{-t} \ -e^{-t} \end{pmatrix}$$ 对应初值为:
$$ Y_2(0) = \begin{pmatrix} 1 \ -1 \end{pmatrix}$$
下图中,有两个解对应于上面这两个,是哪两个?